|
&nbs����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������p;
单元控制系统
单元控制系统包括单元建模、单元����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������运行控制、单元异构设备通����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������讯、单元仿真、单元异常预警、单元加工装备监控等����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������功能。
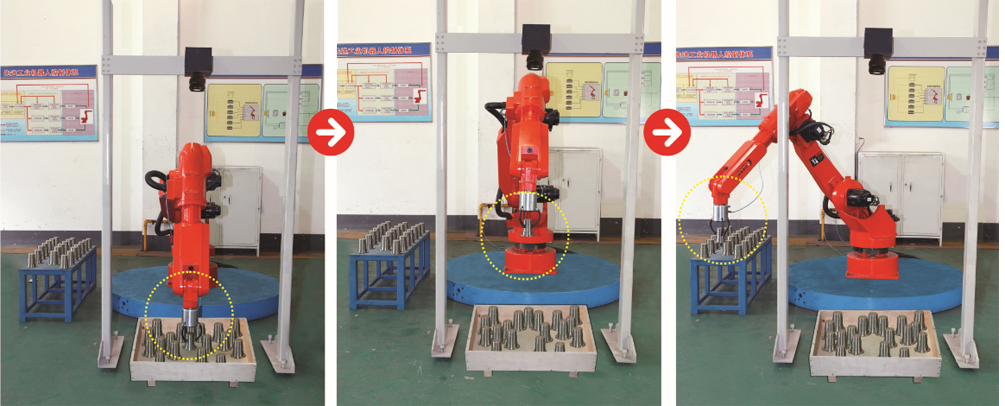
可实现以机器人为核����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������心,连接单元内不同类型机床����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������、检测设备、清洁站等装备,
����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������
通过即时通讯和指令传����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������送,实现单元内的任务调度、自动上下工件、自动����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������检测、工件偏移值补偿等工作。
����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������
|




 关注
关注